Research Laboratories
The university provides a dynamic, discovery-driven intellectual environment that attracts exceptional postgraduate students and trains them for leadership positions in academia, industry, government, research laboratories, and non-profit organizations. Besides a combination of outstanding faculty, state-of-the-art infrastructure, and a culture of rigorous and open inquiry as the foundations of graduate education, the university has invested significant amount of funds in building cutting-edge laboratory facilities to train research scholars and enable them to work on problems of current relevance.
The university is engaged in cutting-edge research themes in areas as diverse as labor law, health care policies, the analysis of big data, the management of natural resources, climate change, drug and polymer design, protein and DNA bioinformatics, chemical and biological networks, inorganic nanomaterials, materials for energy applications, computational finance, mathematics education and research on treatments for cancer, malaria, and other drug-resistant diseases with research findings having been published in high-impact national and international indexed journals.

Electrical Machine Laboratory
Lab Overview Introduction The Electrical Machines laboratory is an essential component in the curriculum of the Electrical and Computer Engineering program. The laboratory provides students with...
Energy Laboratory
Introduction The Energy Laboratory is dedicated to research and training in renewable energy systems and electric mobility. It facilitates experimental work in solar power generation, electric...

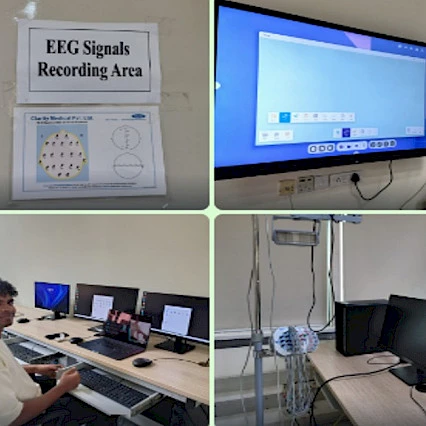
Flexible Bioelectronics and Wearables Laboratory
Flexible Bioelectronics and Wearables Lab 1. Lab Overview Introduction: The Flexible Bioelectronics and Wearables Lab at Shiv Nadar Institution of Eminence is a newly established laboratory with...

VLSI Design Laboratory
VLSI Design Laboratory Lab Overview Introduction The VLSI Design Laboratory at the Department of Electronics & Communication Engineering is a state-of-the-art facility equipped with...

Embedded Electronics Laboratory
Embedded Electronics Laboratory Lab Overview Introduction The Embedded Electronics Laboratory is designed to provide hands-on experience with microcontrollers, sensors, actuators, and...
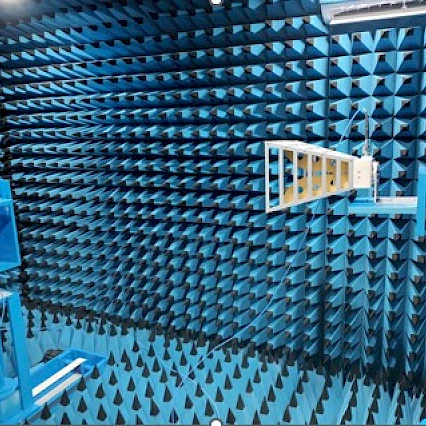
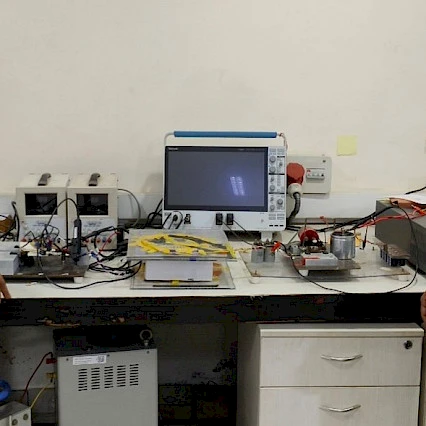
MICROWAVE LAB
MICROWAVE LAB The Microwave Lab is a state-of-the-art facility in the Delhi-NCR region, dedicated to advancing research and innovation in high-frequency communication technologies. With...
DIGITAL SIGNAL PROCESSING LAB
DIGITAL SIGNAL PROCESSING LAB The Digital Signal Processing Lab is where theory meets real-world innovation. The lab aims to bridge theory and practice, driving innovation in energy,...

Power Electronics Laboratory
POWER ELECTRONICS LABORATORY The Power Electronics Laboratory is where theory meets innovation. Here, students and researchers design and test the electronic systems that power tomorrow’s world...

Powder X-ray diffraction instrument
The Shiv Nadar Institute of Eminence Deemed to be University in Delhi NCR has X-ray facility that provides powder X-ray diffraction (XRD) measurements. This facility is maintained by...
Drosophila Facility
Welcome to the Drosophila Facility @SNIoE Our state-of-the-art Drosophila Facility is dedicated to supporting cutting-edge research in genetics, developmental biology, disease modeling, and...
Core Imaging Facility (CIF)
Overview The Core Imaging Facility (CIF) at the Department of Life Sciences, School of Natural Sciences, Shiv Nadar IoE University, Delhi-NCR, is dedicated to providing cutting-edge imaging...
BSL-2 cell culture facility in the Department of Life Sciences
BSL-2 cell culture facility in the Department of Life Sciences The Biosafety Level 2 (BSL2) laboratory incorporates practices, equipment, and facility design that support clinical,...
Protein Expression, Purification, and Characterization Facility
The Protein Expression, Purification, and Characterization Facility at the Department of Life Sciences (DLS), School of Natural Sciences (SNS), Shiv Nadar Institution of Eminence (SNIoE) supports...
Genomics and Proteomics Facility
Genomics and Proteomics Facility The Genomics and Proteomics Facility (GPF) at Shiv Nadar IoE is a premier research platform designed to enable cutting-edge molecular biology, genomics, and...



Concrete Laboratory
Introduction/background of laboratory The concrete testing laboratory contains equipment and facilities for testing different construction materials like concrete, cement, fine aggregates, coarse...
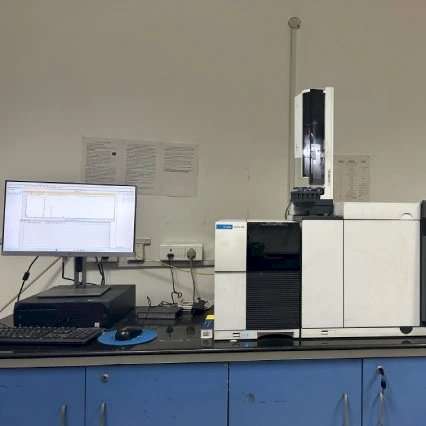
Gas-Chromatography/Gas-Chromatography with Mass Spectrometry
A gas-chromatograph coupled with a mass spectrometer (GC-MS) is a combination of two techniques. The gas chromatograph separates the components of a mixture in time, and the mass spectrometer...

River Hydraulics Laboratory
India being endowed with a vast river network; primary settings is conducive for growth of inland water transport (IWT). The navigation logjams could be nullified by providing low-cost,...

Civil Engineering Computing Laboratory
The Department of Civil Engineering has a UG and PhD curriculum to create strong focus on emerging and disruptive technologies such as Machine Learning (ML), and Remote Sensing (RS) along with core...

Experimental Soil Mechanics Lab
Soil is a multiphase natural material which consists of solid, liquid, and gas. Nearly all the civil engineering structure - building, embankment, dam, underground structures, bridge, earth...

Fluid Mechanics Laboratory
The Fluid Mechanics Lab serves as a pivotal arena where students dive into the intricacies of fluid behavior, with a primary focus on pressure-driven flows, particularly in pipe systems. This...

Agricultural Water Management Laboratory
Agricultural water accounts for more than 85 % of the total fresh water usage in India and more than 70% globally. Considering the present status of stressed fresh water resources, which will only...

Geoinfomatics Laboratory
Geoinformatics is a scientific field that includes the use of emerging techniques such as remote sensing, GIS, and spatial data analysis. These emerging techniques are being widely used for the...

Intelligent Geosystems Laboratory
Intelligent Geosystems Laboratory at SNIoE is focused to strengthening the state-of-the-art knowledge and cutting-edge technologies for intelligent sensing and data analytics for geotechnical...

Hydraulic Engineering
In the realm of hydraulic engineering, understanding the principles governing gravity flow is paramount. The Hydraulics Lab serves as a crucible for students to delve into the intricate dynamics of...

Transportation Engineering Laboratory
Transportation engineering materials play a crucial role in ensuring the durability, safety, and sustainability of roads, bridges, and other infrastructure elements. The laboratory focuses on the...

Water Management Field Laboratory
Water Management Field Laboratory, at Shiv Nadar Institution of Eminence, focuses on the investigation of different aspects and issues related to water and its availability such as flood &...
Water Resources Engineering Computational Lab
The Computational Lab stands at the forefront of technological innovation, utilizing advanced computational tools to address pressing challenges in water management. From simulating river dynamics...

Advanced Materials and Building Energy (AMBE) Lab
Energy is central to achieving India's development ambitions. Rapid urbanization fuelled by high economic development and setting up of “Smart cities” are expected to continue to drive up the...
Strength Of Material (SOM) Laboratory
The Strength of Material (SOM) laboratory contains equipment and facilities for testing different properties of materials as per relevant standards. The laboratory is equipped with universal...

Liquid Chromatography Mass Spectrometry (LCMS)
Make:- Agilent Technologies Model:- Agilent 6540 UHD Accurate-Mass Q-ToF LC/MS Year of Installation: 2013 Specifications Agilent 6540 UHD Accurate-Mass Q-ToF LC/MS Agilent 1290 UPLC...

Matrix Assisted Laser Desorption/Ionization (MALDI)
Bruker Model: Autoflex Max TOF/TOF MALDI Year of Installation: 2018 Specifications Resolution: 26000 Mass range: up to 500,000 Laser: Smart beam II Laser frequency(Hz):...
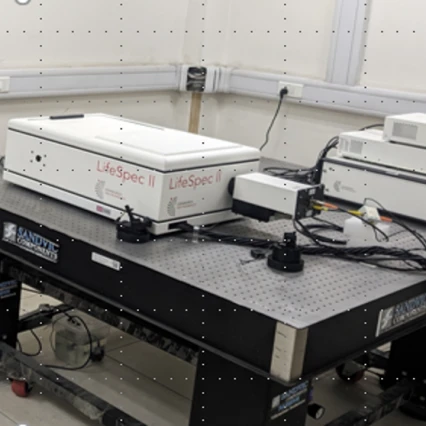
Fluorescence Lifetime Measurement Facility
Make:- Edinburgh Instruments Model:- LifeSpec II Spectrophotometer Year of Installation: 2022 Specifications: Time-resolution: 100 ps – 1 ns (depending on light sources) Detector:...
FTIR Spectrometer
Make: Thermo Scientific Model: NICOLET iS20 Year of Installation: 2020 Specifications: Scan range: 4000 cm-1 - 400 cm-1 Resolution: 1 cm-1 Mode of measurements: ATR and Transmission...
Nuclear Magnetic Resonance (NMR)
The Nuclear Magnetic Resonance Bruker Avance III HD 400(NMR) facility at Shiv Nadar University is equipped with a 400-MHz magnet (operating field at 9.4 Tesla), a multinuclear broadband probe (one...
Differential Scanning Calorimetry (DSC)
Make:- Mettler Toledo Model:- DSC 3 STARe System Year of Installation: 2017 Specifications DSC sensor with 56/120 thermocouples STARe software (V16.10) analysis Sample required is 1 to...
Thermogravimetric Analysis (TGA)
Make:- Mettler Toledo Model:- TGA 2 STARe System Year of Installation: 2019 Specifications Ultra microgram balance with sub microgram resolution over the whole measurement range Optimal...

Single Crystal X-Ray Diffraction (SCXRD)
Brief Introduction about the facility Single-crystal X-ray Diffraction (SCXRD) facility hosted at Shiv Nadar Institution of Eminence (Deemed To Be University) – Delhi NCR is managed by the...

Atomic Force Microscope (AFM)
Make: Oxford Instrument (Asylum Research) Model: MFP3D-Origin Year of Installation: 2023 Specifications Standard X and Y range 120 μm X and Y sensors <0.6 nm noise Z range >15 μm Z...
Electron Paramagnetic Resonance (EPR)
Make: JEOL, Japan Model: JES – X320 Year of Installation: 2023 X-band Universal Cavity Magnetic-field modulation 100 kHz, 50 kHz and 25 kHz, internal modulation...
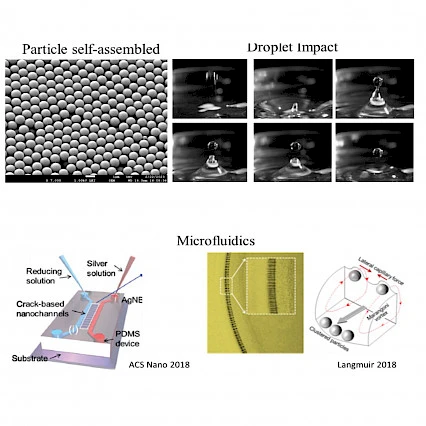
Soft matter lab (SM Lab)
SM lab is research laboratory in Department of Chemical Engineering, SNIOE. Our research focus on self-assembly of microparticle, microfluidics, micro-nano fabrication, inkjet printing technique,...

Intencity Lab (Process Intensification and Safety Lab)
This lab is associated with the research work in the areas of Process Intensification and Process Safety. Several Projects which are undergoing currently in this lab: a. Study on Micromixing and...

Stimulation Lab (Process Control, Modelling and Simulations Lab)
This lab is associated with Numerical modelling and simulations, CFD analysis and process control related research work. Several Research Projects are going on in this lab: CFD study of free...

Complex Fluids Lab
The lab is dedicated towards investigating complex fluid flow instabilities that affect the quality and performance of final polymeric products. Particularly, the recent activities are dedicated...

Energy and environmental sustainability Laboratory
The focus of Energy and Environmental sustainability research group lies in the investigation of ecological technologies to create energy efficient and clean environment. The current focus is on...

Microfluidics Lab
Dr. V. M. Rajesh's Microfluidics Lab stands as a premier research hub, furnished with state-of-the-art facilities. The lab is dedicated to harnessing the potential of microfluidic technologies to...
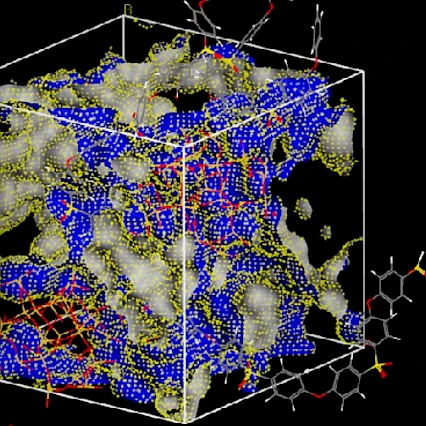
Polymer Materials Research Lab
The group carries out research in membranes, coatings and thin films using polymers, composites, blends, biomaterials and nanomaterials. We use Molecular Dynamics simulations to analyse gas...

Biomass conversion Laboratory
This lab is well equipped for thermochemical conversion of biomass and waste into bioenergy/biofuels in all the three forms; solid (Bio-char), liquid (Bio-oil), and gas (Syngas). The upgradation of...
Computational and Theoretical Soft Matter
The research focus of the Computational and Theoretical Soft Matter Lab lies at the interface of computational modeling of soft matter systems, solvation thermodynamics, interfacial phenomena and...

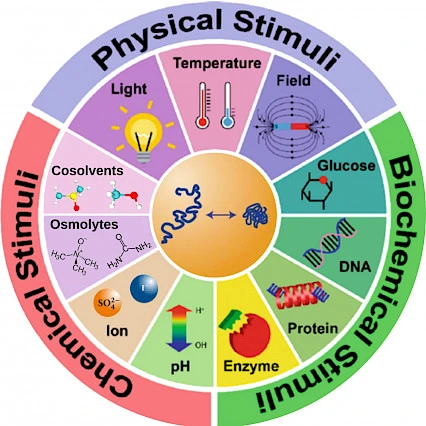
Sustainability & Polymer Laboratory
The research activities of “Sustainability and Polymer Lab” are broadly aligned to address global climate challenges. The “sustainability” objective focuses on reducing carbon footprint of...